i think @
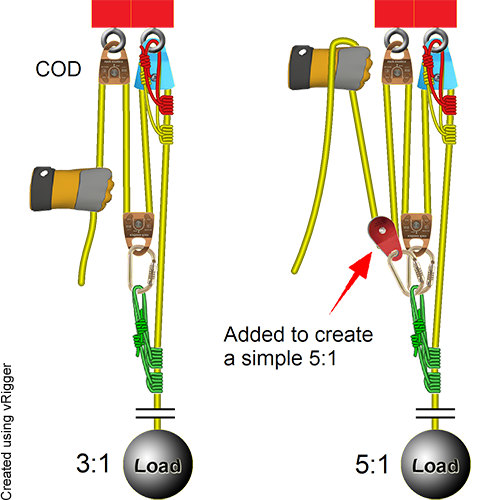
Zebco Kid showed pretty well w/red & yellow upper Prusiks, always have the Prusiks on the Load side of any pulley. Cheek plates or other contrivance (added padlock around rope and Prusik quickly 1x to some one else's existing system)to groom/comb/serve Prusik forward and not get jammed in machinery (pulley, Porty etc.).
i'd usually not have Prusik directly against the raw Load usually, especially if can be over 5-700#.
This can be for safety and 'ratchetting' of rest holds, or then impacts etc.
1 Prusik to take the Load at that point and 1 as clean-up and backup.
Many, things are of this bulk stop and then bow to nothing 100% efficient with another stop, that is also a keeper of the first and safety backup as well. Kinda like cleaning or sanding etc. of bulk hit and fine finish to me in some ways tho.
.
But for adjustment @
Dan Cobb suggests for more flexibility in adjusting power/speed tradeoffs for varying functions and load ranges for varied not single usage; (always seemed the rescue pix of Prusik on the Load side of final anchor pulley as he says) , i would '2hand'/double input into the system (or have a quick zRig to add, or improvise 2 or 3x with tail).
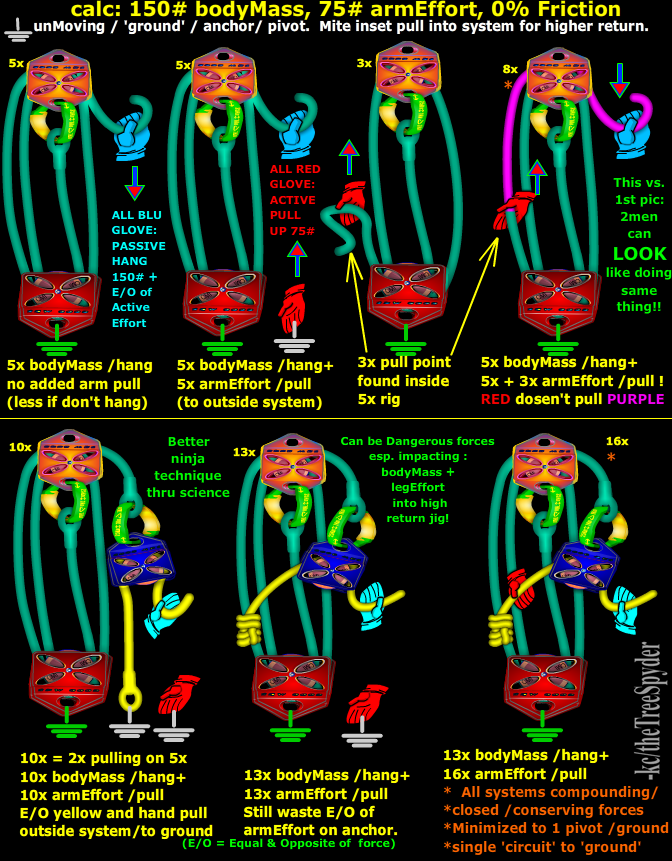
'2hand'/double input where can instead of input of effort up to body weight,
input Bodyweight + Effort + equal & opposite of Effort (kind of a morph i found of DdRT; after sitting in DdRT an embarrassingly long time before seeing this). The 2 part input (Bodyweight & Effort) can hold Load at bay with 1 input and impact with other, or both in concert, or impact start with 1 and maintain with it and add other follow thru
>>much more flexible system to varying strategies w/less rope and pulleys.
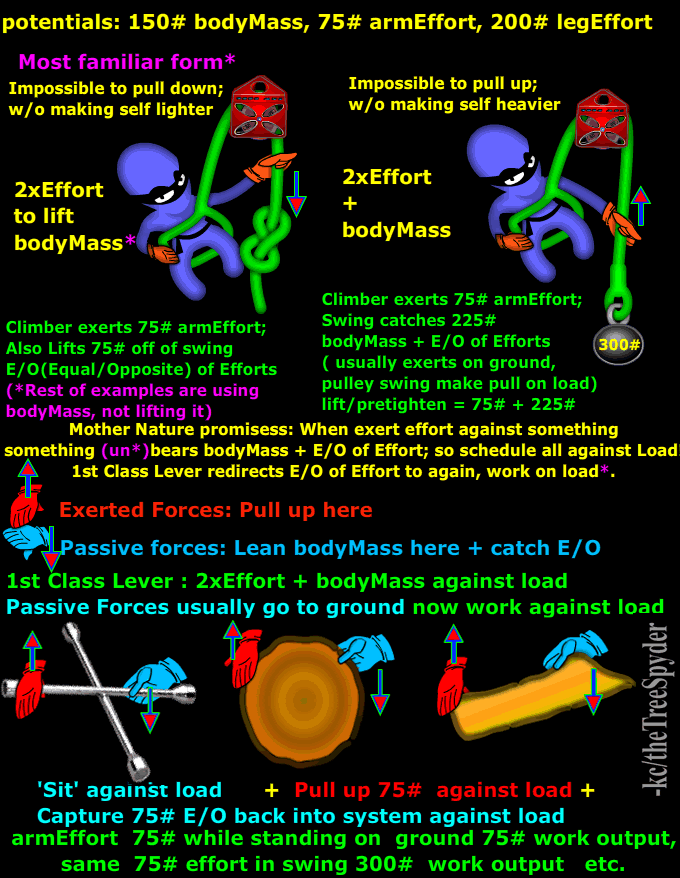
The strategy of inventorying and collecting all possible forces of Bodyweight + Effort + equal & opposite of Effort to then leverage against Load i distilled it further down to anytime can connive a 1st class lever of pulley in flexible levers/ropes or see-saw in rigid levers and get Bodyweight to work directly or indirectly against the Load and then add Effort and use the 1st class lever system (one with pivot between input and output, not on end where input and output are next to each other) to capture and return back to service against Load the escaping equal & opposite Effort that is normal byproduct of Effort, only now collected and deployed to service against Load....
Systematically one of the greatest things i found for simply increasing output, with existing tools, shituation etc. by using the usually unrealized autonomous responses if equal & opposite of Effort and also Bodyweight as a separate input and not just a limiter to single input of effort.
Note how at least 1 Effort part goes directly, unfiltered against Load side of pivot in each case.
If the last log pic is a log in air, it's own CoG then becomes the pivot of most loaded point, just like 2/1 in pulley as pivot point receiving both inputs to apex.
In fancier terms we are just 'conserving' most/all forces have to target against load as inputs to then be leveraged.
.
This is aberrant to normal thinking (guess no surprise thar) that if single pulley MUST be on/against/output to Load/dynamic position to increase power or against input/dynamic Effort position to increase speed. Single pulley on anchor/static position as redirect only. For here can get more power from single pulley on anchor/static !
Just as do in DdRT over own self; of 1 input affecting 2 pulls against Load(self)!!
DdRT presents Effort and equal & opposite against Load(self) by capturing equal & opposite running away from work around to also helping. Strategy shown takes that and adds self/bodyweight that was Load to know be in concert with the Effort + equal & opposite of Effort against a now other Load.
.
There will be reduction in output potential from frictions, so 5:1 may return 4.3x, but not of any inputs directly against Load as can do here. But, 5:1 rig will always take 5x Distance input vs. output even if force return is 3.3x w/higher frictions.